LiDAR QC, part of Applanix DG Solutions, uses LiDAR SLAM as an aiding sensor to improve georeferencing accuracy in areas of poor GNSS coverage, enabling high-accuracy data collections in virtually any environment. Available as a Cloud Service!
Elevate Your Georeferencing Accuracy with Applanix LiDAR QC Tools
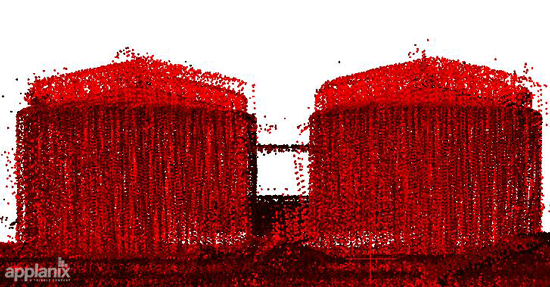
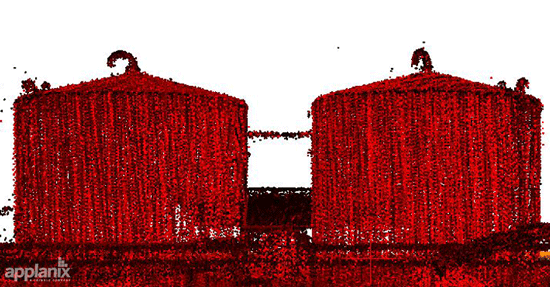
No more position offsets, get supreme accuracy from the get-go!
Only LiDAR QC Tools...
- Enables trajectory optimization in weak or denied GNSS locations
- Integrates with any LiDAR system
- Optimizes DG and LiDAR point cloud accuracy
- Is available as a Cloud-based service

Applanix LiDAR QC Tools are a set of POSPac software tools developed by Trimble to achieve the highest level of georeferencing accuracy using LiDAR sensors. Applanix LiDAR QC Tools supports boresight calibration between IMU and LiDAR sensors, trajectory correction and LAS file point cloud generation.
|
|
|
| Trajectory Adjustment: Perfect your LiDAR data with trajectory corrections for superior georeferencing results | ||
| Unrivaled Accuracy: Precision boresight calibration ensures your data is spot-on, every time | ||
| Seamless Integration: Works with any LiDAR system with simple automatic processing as part of POSPac desktop, batch or Cloud | ||
| Flexible Licensing: Available as a term license or Cloud API |
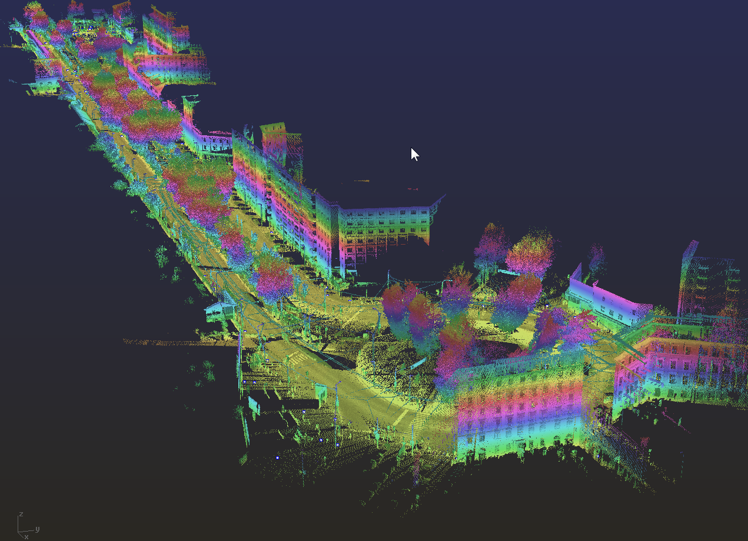
How it Works
- Data Magic: Transform LiDAR data into 3D Points (Voxels).
- Precision Matching: Seamlessly align data in overlap regions.
- Advanced Adjustment: Harness the power of iterative least squares adjustment.
- Trajectory Perfection: Correct position and orientation for ultimate accuracy.
- Export with Ease: Apply boresight angles to third-party software or create a new trajectory file.

ELEVATE YOUR LIDAR GAME
Contact Us
With unparalleled accuracy and a drive to help you succeed, our team of experts can support your most challenging applications.
|