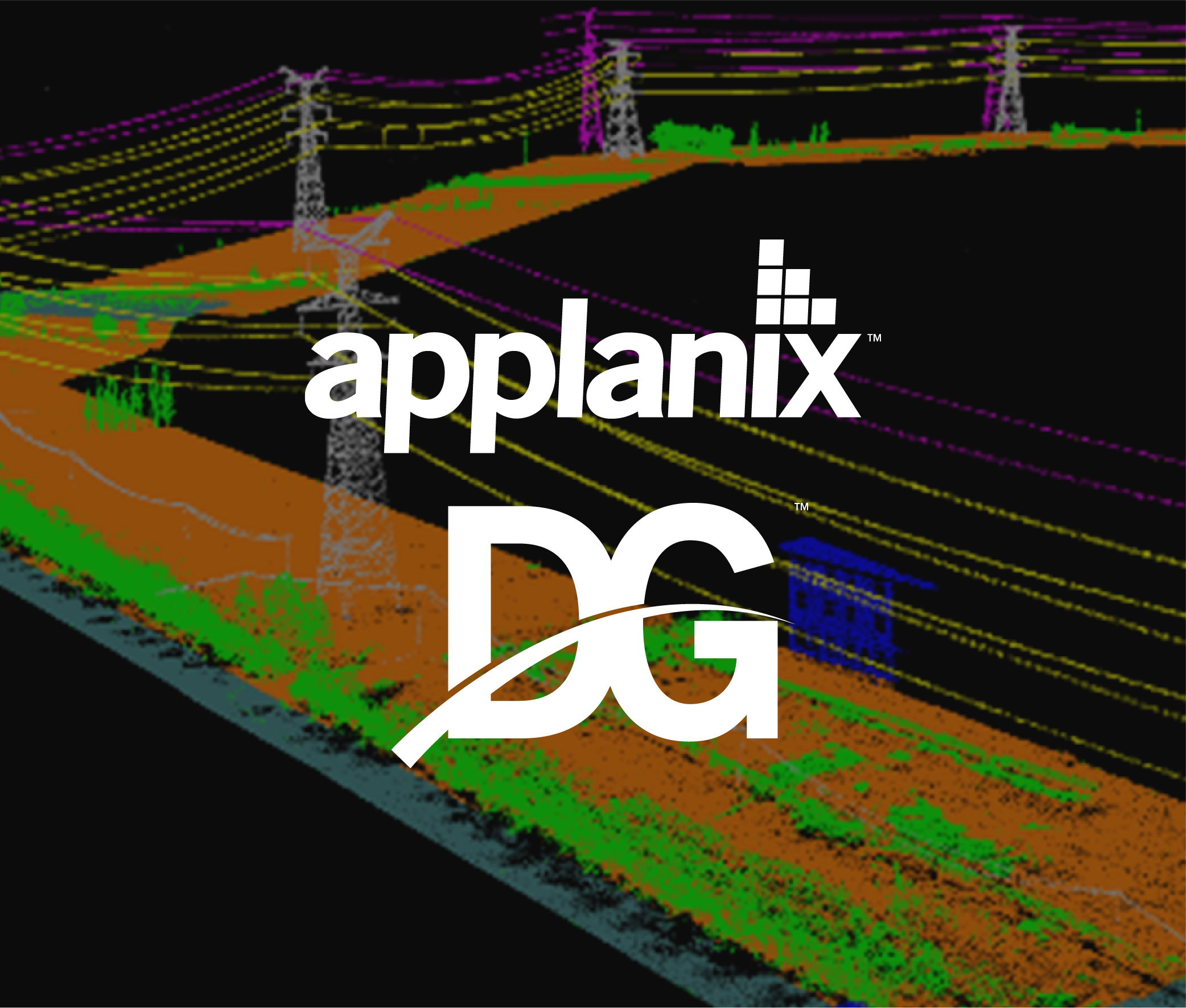
In today’s world of survey and mapping with UAVs, LiDAR has become an essential tool in support of many 3D mapping applications. The ability to generate multiple returns with various LiDAR sensors, provides mission critical data for many geospatial applications including forest management, transmission line monitoring, 3D models for the creation of digital twins and much, much more. However, for the data to be useful for decision making, it needs to be accurate, and in order to achieve this accuracy the data needs to be georeferenced to true ground position on the earth.
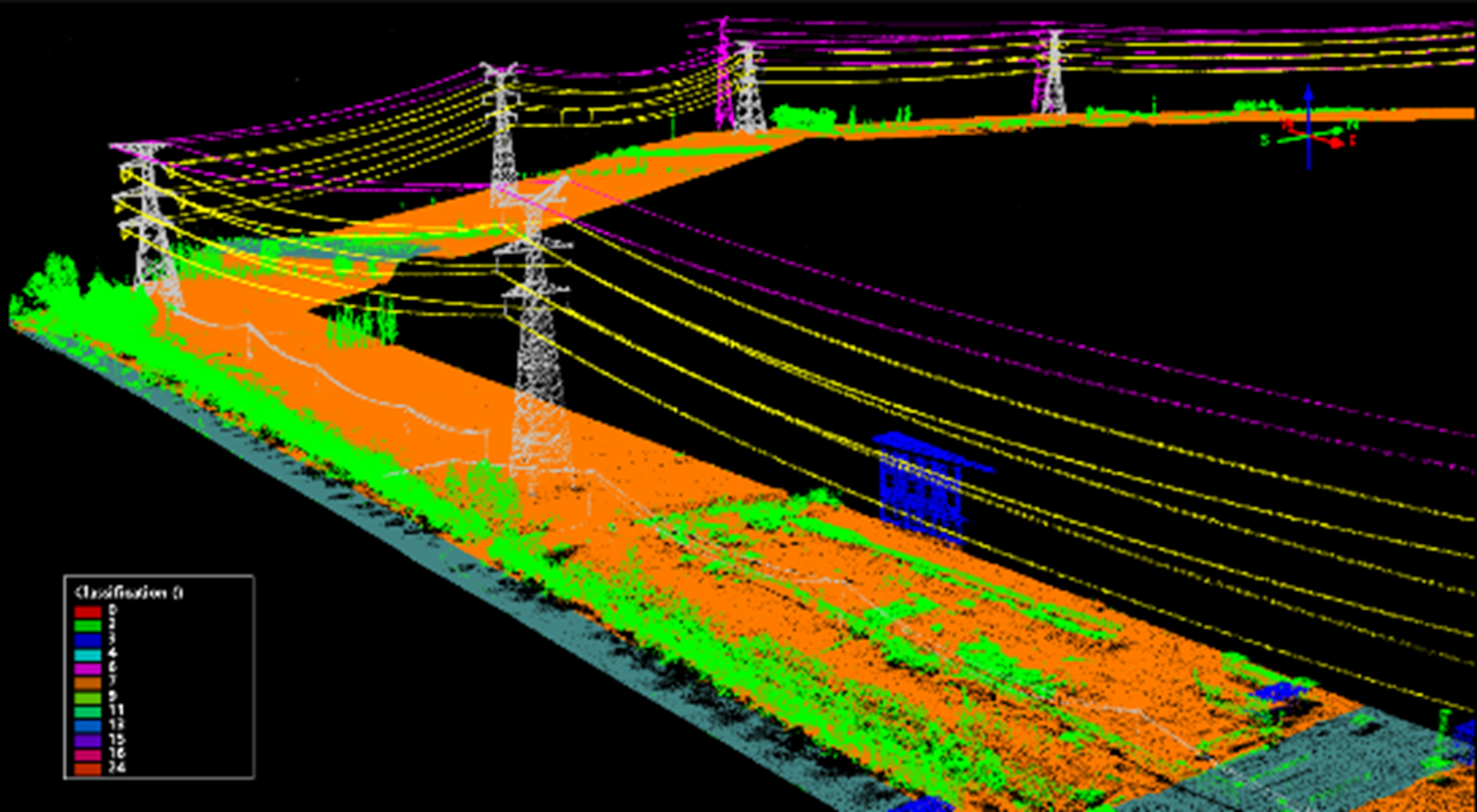
Transmission Line Mapping with LiDAR (Image courtesy of SureStar)
The output of a LiDAR are ranges and angles from the sensor to the surfaces being scanned by its laser. These are then converted into a point cloud (3D coordinates) relative to the location of the LiDAR. In order to use these point clouds for mapping applications, they must then be georeferenced.
So, what are the methods available to georeference LiDAR (i.e. point cloud) data?
There are several methods available for georeferencing point clouds, including:
1. Method with Ground Control Points
LiDAR point clouds can be georeferenced with the aid of ground control point markers (typically existing flat surfaces) positioned throughout the area to be scanned. The issue with this methodology is that the accuracy is dependent on both the positioning and quantity of ground control points (GCPs) used. As well, the time and cost associated with establishing and positioning the targets often makes this approach uneconomical, especially as the area being mapped grows larger.
2. Register to Reference Files
Another method is to use pre-existing digital files, such as building models or CAD drawings that have already been georeferenced. This is accomplished by aligning your point cloud model with identifiable reference points within the digital files. Another variant of this is to use a pre-existing point cloud that has been previously georeferenced, as you can then register your new point cloud to the previously registered point cloud. The accuracy of the final point-cloud is dependent upon both the ability to properly co-register the data, and the accuracy of the pre-existing reference data itself.
Both of the above methods are less than optimal since they can lead to inaccuracies being introduced into the data set, and are very time consuming.
Is there a better way of accurately georeferencing point clouds from LiDAR?
The better way of georeferencing LiDAR point cloud data both from an accuracy and economic perspective is through the use of Direct Georeferencing. In fact if GCPs or corresponding referencing files are not available, then the only other way to accurately and precisely georeferenced your point cloud data is with Direct Georeferencing, thus making DG essential for the georeferencing of LiDAR data.
So what is Direct Georeferencing and how can it be used to georeferenced LiDAR point clouds?
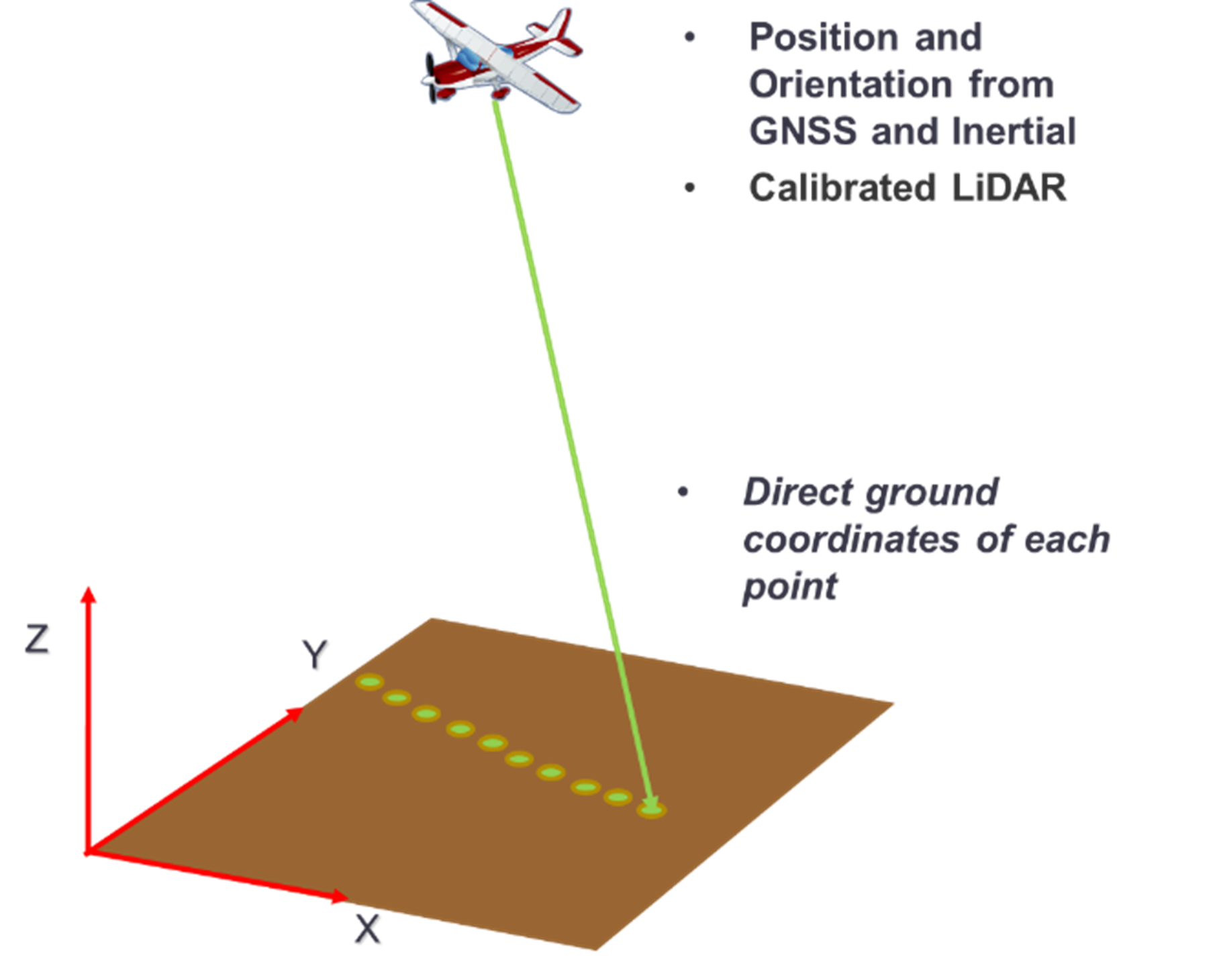
Direct Georeferencing or DG directly measures the position and orientation of the LiDAR with respect to the earth. This means the 3D coordinates of a point cloud computed from the LiDAR ranges and angles can be directly assigned a geographical location on the earth, without the need for ground control points or any additional measurements referencing the ground.
At its core Direct Georeferencing uses two systems, a Global Navigational Satellite Systems “GNSS” and Inertial Measurement Unit “IMU”. The GNSS records position (i.e. “X, Y, Z” coordinates, and the IMU records the orientation angles “w, φ, k” at the time of capture. These parameters are merged and are assigned to each point within the LiDAR image. Using this data, accurate and precise georeferencing can be completed as illustrated in the accompanying figure.
With today’s UAV survey and mapping systems the use of LiDAR has grown exponentially, and given the mission critical data they are collecting via LiDAR, has resulted in many professional grade LiDAR mapping solutions adopting DG for georeferencing.
What hardware / software will I need for Direct Georeferencing of my LiDAR data?
You will need an integrated GNSS/IMU, such as the Applanix APX-15 unit illustrated below:
Applanix APX-15 UAV
The APX-15 is an OEM board with embedded GNSS and IMU that will need to be integrated with the LiDAR payload on the UAV platform. The data from this are then processed through the Applanix POSPac UAV post-processing software solution to generate the high accuracy geographically reference position and orientation accurate to the cm level. This data are then further processed through the POSPac LIDAR QC Tools along with the LiDAR data to measure the misalignment between the IMU and the LiDAR Sensor (Boresight angles), and to generate the final georeferenced point cloud. The processing can be automated through desktop batch processing or through the POSPac UAV Cloud API.
For further details please see: https://www.applanix.com/products/dg-uavs.htm
Some final comments:
The key value of this technology and the benefit of using Direct Georeferencing for your LiDAR point cloud data is that all the objects (points) within the point cloud will be precisely and accurately positioned on the ground with minimal processing steps, so that the subsequent data products produced can quickly and efficiently be used for survey grade mapping work. So - Why is direct georeferencing essential for survey & mapping with LiDAR systems? Well, simply put, Direct Georeferencing is the most efficient and most accurate method available today to georeferenced LiDAR point cloud data.