A common question customers have is “What makes Direct Georeferencing (DG) different than other methods of georeferencing your UAV data (such as using Aerial Triangulation (AT) or PPK processing [position from GNSS only with AT]), when trying to achieve survey-grade accuracy?”
To answer this question, we must first define Direct Georeferencing. This term can also refer to a broader range of georeferencing methods in the UAV industry and thus can lead to misconceptions and misunderstandings about what precisely Direct Georeferencing is.
Direct Georeferencing refers to the method of assigning the absolute geographic coordinates of a pixel or LiDAR point by computing the position and orientation of an imaging payload with respect to the Earth to a very high degree of accuracy and precision without the use of ground control points (GCPs). This is accomplished using multi-frequency, multi-constellation RTK and post-process carrier phase Differential GNSS tightly integrated with calibrated inertial sensors.
The other methods of georeferencing sensor imagery - Aerial Triangulation and PPK processing - can also achieve survey-grade accuracy; however, they require capturing approximately 80 percent of overlapping images and the collection of a robust distribution of ground control points.
Even though Direct Georeferencing has a higher up-front cost, savings start to kick-in after flying only a few missions, as DG does not require the collection of, or the processing of ground control points, both of which add time and cost to any project. As well, since Direct Georeferencing does not employ pixel matching techniques (the creation of tie-points) and does not require extensive image overlap, flight missions with Direct Georeferencing can cover more area and flown more expeditiously with fewer flight lines, such as in the illustration below.
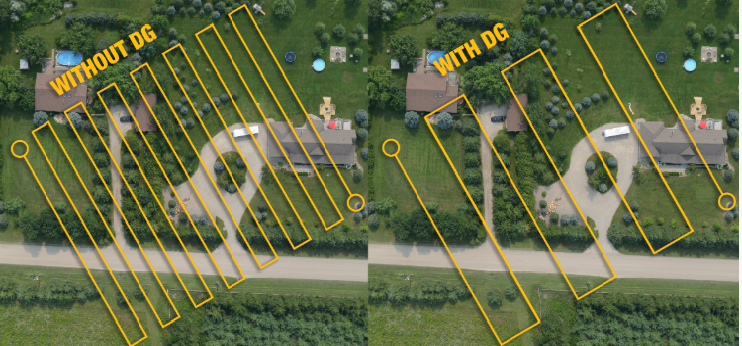
Flight line mapping without DG and with DG
If based solely on time and cost factors, Direct Georeferencing appears to be the better option; however, there are also additional scenarios as to why Direct Georeferencing is the only solution available to precisely and accurately capture and georeference UAV imagery!
So, what are these other factors and considerations?
There are a variety of scenarios where DG becomes the only choice for effectively and efficiently capturing and georeferencing UAV imagery, such as the ‘area to be flown’ and ‘mission type’ – let’s dive a little further into this and exam some of those situations.
1. UAV Survey and Mapping within Dangerous or Hazardous Areas
After a flood or landslide, due to the potential instability of the land, it is next to impossible to employ Aerial Triangulation to remap an area with a UAV. This is because pre-existing survey monuments and any pre-existing ground control points are likely to have been damaged. Also, sending a crew into the landslide or flooded area to collect a few well-positioned ground control points is too risky!
Another challenge with Aerial Triangulation and PPK, as mentioned earlier, is the need to generate a large number of tie-points in the overlapping imagery to solve for the orientation. In flooded areas, the point matching can often fail. With DG – no ground control points or tie-points are required to create a highly accurate survey-grade quality map of the affected area. A Direct Georeferencing system outputs the Exterior Orientation directly for each image, allowing ortho maps and basic Digital Elevation Models to be produced quickly and efficiently. Given these circumstances, Direct Georeferencing is the only viable UAV solution.
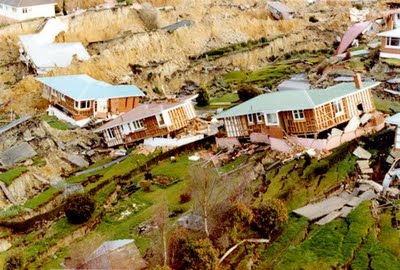
Example of a landslide - a dangerous or hazardous area
2. Mapping Inaccessible Areas or Regions where ground control has not been previously established
Similarly, when mapping inaccessible and homogenous areas such as swamps, glaciers, deserts and other similar landscapes, collecting ground control points or employing pixel matching techniques may not be viable given the nature of the terrain. Using Direct Georeferencing, which does not require ground control points or pixel matching to position the data correctly, becomes the only real practical solution for these projects.

Example of a swamp - a homogenous or inaccessible area
3. Corridor Mapping
Direct Georeferencing has also proven to be uniquely valuable for UAV-based corridor mapping, such as mapping roads, pipelines, or transmission lines.
Using non-Direct Georeferencing methods for corridor mapping, UAV survey teams will lay out a network of ground control points and fly sections of the corridor employing up to an 80 percent sidelap to capture imagery over multiple parallel flight lines. These projects tend to be highly time-consuming, since it is necessary to establish multiple ground control points networks to map each area along the corridor.
Whereas with Direct Georeferencing, you can fly in corridors without ground control points and pixel matching techniques. This results in the capture of the required information for a dual or even a single corridor strip.
![]()
Transmission corridor
4. Using a LiDAR for Precision Survey and Mapping Work
Direct Georeferencing is a must for survey and mapping work where LiDAR is used to collect precise and accurate data. Even though there are other methods that exist to georeference LiDAR point clouds, such as ground control points or registering to pre-existing reference files, these methods tend to be less accurate and take longer as more steps are involved.
Direct Georeferencing for LiDAR uses two onboard UAV systems, a survey-grade Global Navigational Satellite System (GNSS) receiver and Inertial Measurement Unit (IMU). The GNSS records position (i.e. “X, Y, Z” coordinates), and the IMU records the orientation angles “w, φ, k” at the time of capture.
These parameters are merged and assigned to each point within the LiDAR image, facilitating the accurate georeferencing of each point within the point cloud while reducing the number of steps and time-consuming adjustments necessary to register the data accurately.
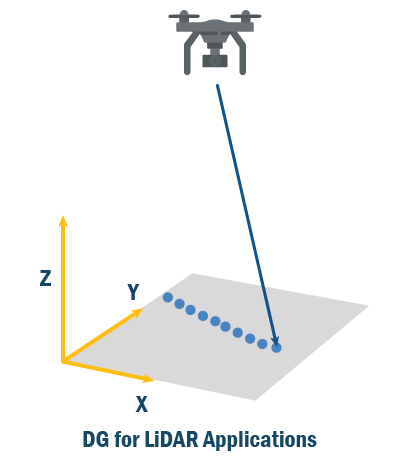
DG for LiDAR applications
With the above examples, we can see that Direct Georeferencing provides exceptional value in certain situations for UAV survey and mapping, in addition to the time and cost benefits described above.
However, are all Direct Georeferencing solutions consistently equal?
Unfortunately not. There are some in the industry that claim to support Direct Georeferencing, when in reality their solutions have shortcomings, such as the use of low grade Inertial Measurement Units (IMUs), or work with Inertial Navigation Solutions that have not been calibrated for survey and mapping work. With Applanix DG, in each case, an advanced UAV error model (rotor or fixed-wing) is developed for the custom IMU to produce the required product accuracy within Real-Time or using a Post-Processing method.
Other items to consider when selecting a Direct Georeferencing solution:
- The level of integration between the GNSS and the IMU. As part of Trimble, Applanix builds and designs tightly integrated GNSS and Inertial HW and SW solutions.
- IMUs designed and built explicitly for Direct Georeferencing. Applanix is the Inertial Center of Excellence for Trimble and has a dedicated team of experts who design IMUs specifically for Direct Georeferencing and other applications. The IMUs are either manufactured in house, or via a partner.
- The availability of a second IMU for gimballed configurations, along with a processing solution that can handle 2 sets of orientation values. All APX UAV systems have Dual IMU options.
- The quality of the GNSS and frequencies and constellations supported. The Trimble GNSS technology embedded into the Applanix APX UAV products is the same, low-noise, multi-frequency, multi-constellation HW used in Trimble’s industry-leading survey products.
- The purpose-built post-processing SW that automatically generates the best possible Position and Orientation solution for DG, with associated tools for boresighting the IMU to the sensors and for performing quality control. The patented Applanix POSPac software (available both on Desktop and Cloud) has been developed and continuously optimized using the latest Aided-Inertial processing methods tuned for specific DG applications.
- The GNSS augmentation methods provided to achieve centimetre accurate positioning, robustly and cost-effectively anywhere in the world. In addition to providing support for traditional Single Base or Multi-Single base station processing, the Applanix DG solutions for UAV provide automatic GNSS augmentation solutions using its Applanix SmartBase post-processed VRS solution and the global Trimble CenterPoint RTX correction service.
So, in summary ‘What makes Direct Georeferencing (DG) different than other methods of georeferencing your UAV data, when trying to achieve survey-grade accuracy?”
The key differentiators come down to:
- Saving time and money with DG
- Planned project/mission type (e.g. corridor mapping)
- Area to be flown (e.g. accessibility, land cover type)
- Sensor requirements (e.g. survey and mapping with LiDAR, where DG is a necessity for best results)
There is a lot of new technology emerging within the UAV industry for survey and mapping, so it is crucial to take the time to understand how the technology can impact your survey and mapping results. The bottom line is to fully understand your end-user product requirements and select the right technology to meet your objectives – ‘the devil is really in the details!