
No GNSS, no problem! Applanix’s LiDAR navigation solution uses its proprietary real-time simultaneous localization and mapping (SLAM) engine to enable its inertial navigation systems to operate in fully GNSS-denied subterranean environments by integrating inertial and LiDAR sensing data. Intermittent GNSS availability or surveyed LiDAR retroreflectors are used to georeference SLAM trajectories and point cloud maps. These can then be used for real-time localization as well as for data analytics such as tunnel deformation analysis.
Solution:
- LiDAR-based localization
- A Simultaneous Location and Mapping (SLAM) solution
- Flexible implementation: stand-alone or in concert with our industry-leading POS LV technology
- POSPac post-processing refines georeferenced point cloud data into very accurate base-maps
Overview
By using an active sensor in GNSS-denied environments, coupled with changing light and environmental conditions, such as dust and dirt, the Applanix LiDAR navigation solution accurately maps the environment, localizes it in real-time, and presents pass to pass data with an accuracy which allows for change detection. While SLAM is not a new technique to localize a vehicle, Applanix offers an advantage with a flexible implementation of the technology, either in a stand-alone operating mode or used in concert with our industry-leading POS LV technology. Coupled with the Applanix POSPac post-processing software suite, real-time data can be further refined to georeferenced point cloud data that provides very accurate basemaps with geospatial data.
The concept of operation is simple:
- A vehicle maps the infrastructure
- The data is processed
- A SLAM map is constructed and loaded onto an autonomous vehicle
- That vehicle utilizes the map to localize in real time
NEED: OPERATING IN GNSS-DENIED ENVIRONMENTS
Automating equipment which operates in challenging conditions requires the ability to precisely determine where it is to perform tasks efficiently and precisely. Applanix offers not only the capability to precisely determine where equipment is in GNSS-denied environments, but a complete workflow to map, localize and exploit data effectively. This enables operators to maximize flexibility in equipment utilization and deployment, as well as to gain full awareness of the mining environment at all points of the vehicle’s operation. Most importantly, our localization solutions can be modified to fit any vehicle and operating environment with customized data outputs ensuring the data is most relevant for that specific mine operator.
CHALLENGE: MINING OPERATIONS OFFER UNIQUE CHALLENGES
Underground mining tunnels pose unique challenges in navigation. The total obstruction of signals from global navigation satellite systems (GNSS) implies that GNSS-aided inertial navigation systems (INS) are reduced to an inertial dead-reckoning navigator, which is subject to increasing error (or drift) due to the integration of errors, noise, and biases over time. LiDAR sensors provide an alternate aiding source in underground environments, allowing the time-scaled errors from inertial navigation to be bounded instead by distance in the absence of GNSS.
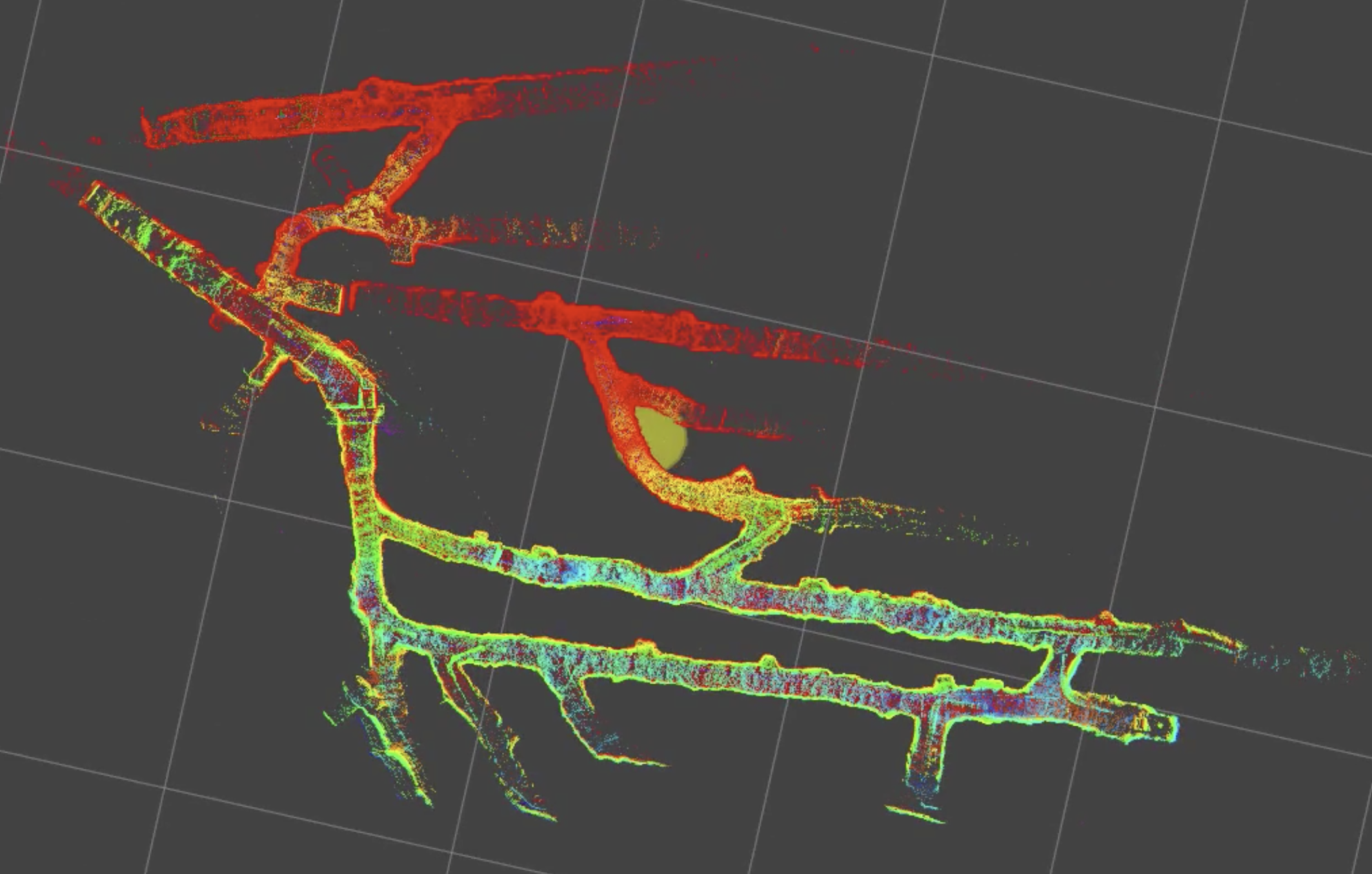
Top-down map of underground tunnels taken with LiDAR and Applanix' SLAM technology
SOLUTION
Applanix’s LiDAR-based navigation solution has been tested in a diverse set of industrial environments. Here, however, we examine the specific use case of subterranean tunnels.
The number of LiDAR sensors used, and their specific placement location on the vehicle, is determined by the specific vehicle being used as well as the specific application. Navigation performance can be affected by a vehicle blocking its own sensors’ field of view, so this must be planned for when outfitting the vehicle. Another consideration is whether or not the system is being used solely for navigation, or if producing a point-cloud map is also required. Producing a full map requires additional sensors.
Applanix used a system with front and back pointing LiDARs to mitigate the problem of self-occlusion, as well as a vertically-mounted LiDAR for the purpose of mapping. This was integrated with the Applanix POS LV which provided inertial measurements and time synchronization between all sensors.
The core of Applanix’s LiDAR navigation system is a real-time SLAM engine that concurrently estimates a vehicle’s trajectory as well as the map from accumulated LiDAR data. The combination of LiDARs with the inertial sensor allows the SLAM system to estimate vehicle trajectories and produce navigation maps that are considered metrically consistent at the local scale (i.e, on the order of the LiDAR sensors’ range), and topologically consistent on the global scale. It is unnecessary for the vehicle to remain stationary at any point to allow for static LiDAR scans to be obtained. The Applanix system is also tolerant to the typical level of vibration that a vehicle used in a subterranean setting would experience. Above is an example of a point cloud map produced by Applanix’s LiDAR SLAM system.
SLAM systems are not immune to error accumulation, unless exteroceptive measurements in a global frame (e.g., geodetic coordinate system) are readily available throughout the map. This could be the case if surveyed retroreflective markers are observable by the LiDARs. In some applications, it may be feasible for a vehicle to exit the subterranean tunnels and receive GNSS measurements, thus allowing for sections of a map to be globally consistent. These global exteroceptive measurements could easily be incorporated into Applanix’s LiDAR SLAM framework to provide the optimal trajectories and maps given the available measurements.

LiDAR sensors affixed to autonomous vehicle in customized SLAM configuration
The map generated from SLAM can be reused for localization, or in other words, navigation without mapping. This is typically done in environments that are expected to be fairly static over time. In some cases, it could be advantageous to run SLAM repeatedly. In subterranean settings, this would allow multiple maps of the same tunnels to be generated and compared with each other to check for deformation. With the hardware setup Applanix used, the level of detail obtainable in a LiDAR point cloud map can be seen here, where sufficient point cloud density allows for the inspection of ceiling infrastructure.
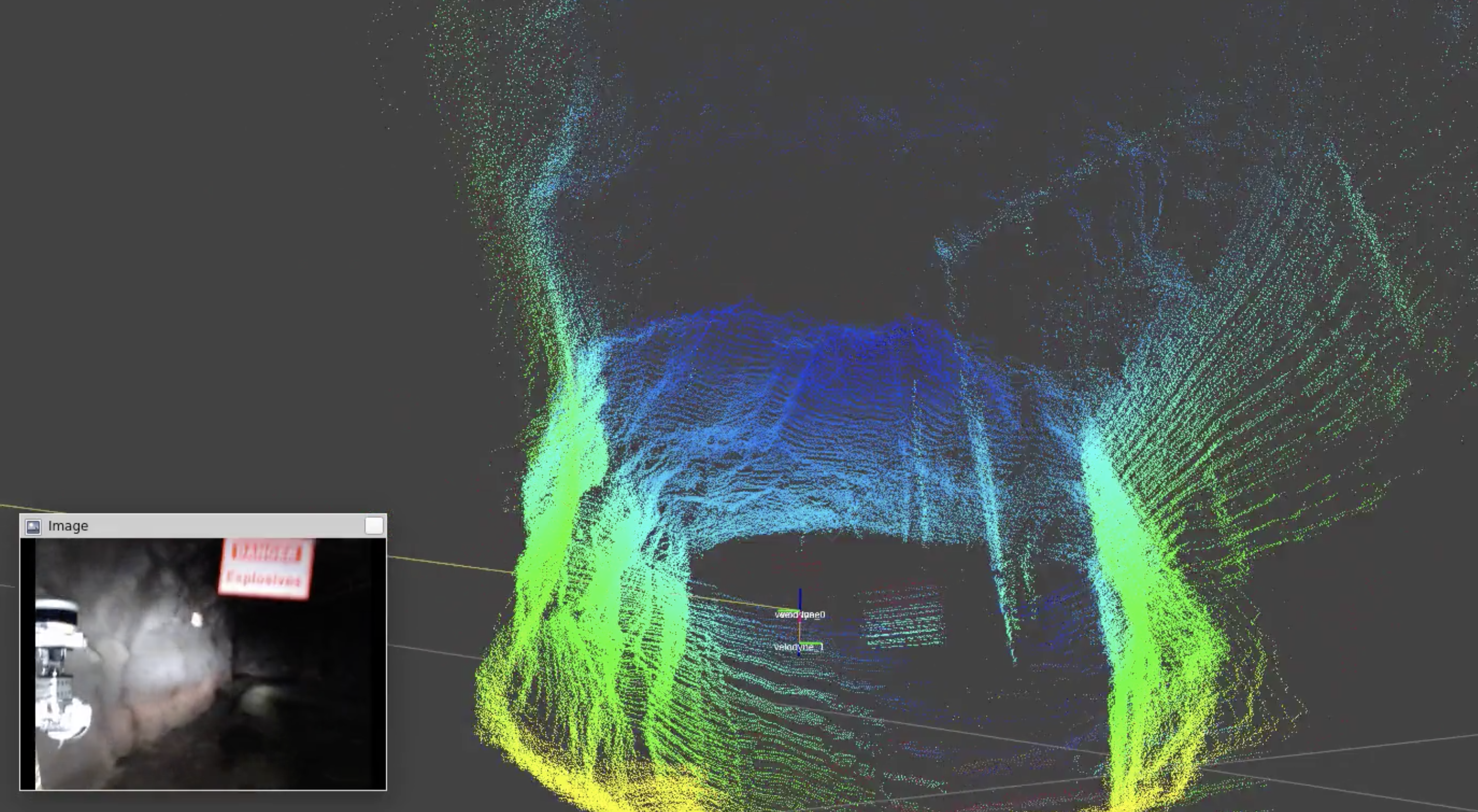
High-density LiDAR point-cloud map produced from data collected in underground mine with poor visibility
RESULTS: NO GNSS, NO PROBLEM
Depending on your operating environment, our custom solutions can be tailored to meet any mission. With the ability to operate with GNSS-inertial or not, our solutions blend powerful localization algorithms with our core positioning technology for reliable and repeatable results.
In close collaboration with our clients, we gather specific requirements up front to create tailored solutions ensuring a seamless solution which takes into consideration vehicle, operating environment, workflow, on-site legacy systems, and how to use the data effectively.
Applanix Advantages:
- Over a decade operating GNSS-inertial and SLAM in mining
environments - Full on-site engineering consultation and testing

Some members of the Applanix Autonomous Team