One of the questions we hear frequently at Applanix is ‘why pay for a high quality integrated Direct Georeferencing solution when less expensive Aerial Triangulation (AT) solutions are available?’ It is a valid question given that less expensive AT solutions can also provide the mapping accuracy and precision required for georeferencing image data.
The answer? Much lower down-stream cost.
There are many things to consider when selecting a methodology and technology to georeference your UAV collected imagery. Less expensive solutions may present an up-front cost saving, but are significantly more expensive in the long run when looking at the costs involved to collect the data and with getting acceptable georeferenced data.
So let’s examine this further:
Methodologies for Georeferencing UAV Imagery
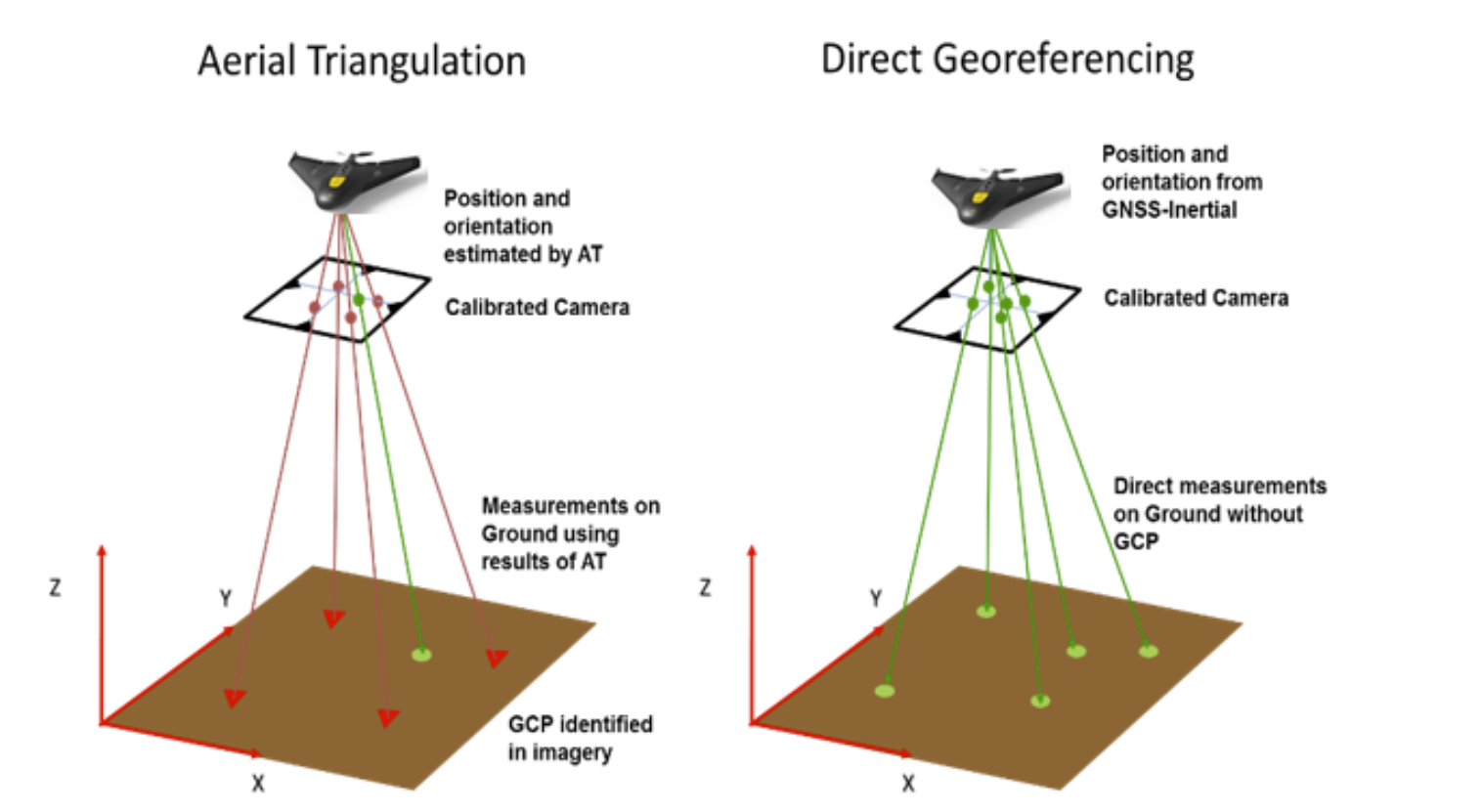
There are two methods for georeferencing UAV imagery: Aerial Triangulation (AT) and Direct Georeferencing (DG). AT computes the position and orientation of each image using common points matched in overlapping images and a least squares adjustment process. The absolute position with respect to the ground is established through pre-surveyed Ground Control Points (GCP’s) manually identified in the imagery, or through the use of GNSS PPK to provide centimetre-level position of the UAV. DG computes the position and orientation of each image directly using GNSS and Inertial without the need to use any ground information or point matching. AT on its own can provide accurate and precise results as long as there are a sufficient number of GCP’s well dispersed over the area flown, and with GNSS PPK if enough endlap and sidelap (typically 80%) is flown to allow points to be matched with strong enough geometry to solve for the orientation.
But what about areas where you do not have good ground control or any ground control at all?
In these cases, for AT alone it will be necessary to collect the ground control required before flying the UAV mission. This adds a huge time and cost factor, which certainly accumulates if required over multiple projects.
But what if I want to use GNSS PPK with AT and fly a one-way corridor project, or fly only minimal sidelap (i.e. 10%) to maximize the area covered by my limited flight time?
Very simply, you can’t. You will have no choice but to fly at least two strips along the corridor, and a sidelap of at least 60% in order to ensure the point matching and geometry of the block is sufficient for the AT. This increase time and costs.
OK then, what cost advantages does Direct Georeferencing have over AT?
Here are three advantages to consider:
1. Less mission prep - no ground control points needed!
Perhaps the biggest cost is the collection of ground control in support of AT. There is both a time and cost factor that must be considered when collecting GCPs is necessary, and it certainly doesn’t take many UAV projects to cover the additional cost of purchasing a quality DG solution up front, where no GCPs are required.
2. Fly projects faster or fly larger areas on a single flight as DG requires little or no sidelap
Since a DG system already produces orientation and does not require AT to do so, it does not require any sidelap to be flown except for coverage purposes. So instead of always needing to fly a typical sidelap of 60 to 80% for AT, area projects can be flown with as little as 10 to 20% sidelap, and corridors with no sidelap. Thus, by reducing the sidelap required you can fly your project area faster and with greater efficiency.
This is especially important for UAVs that have a limited flight time. By decreasing sidelap, a larger area can be flown on one mission before a battery needs to be changed.
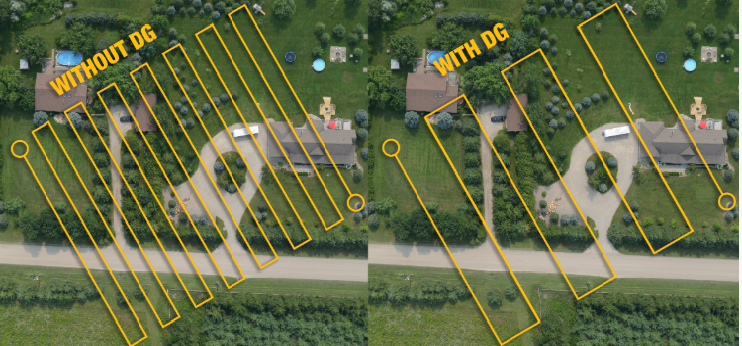
Sidelap without DG vs sidelap with DG
3. Faster data processing
In traditional photogrammetry, the mapping process can only begin once the AT process has been completed to generate the position and orientation of each image. This requires extensive processing time to run point matching on the imagery and then run the least squares adjustment. With a DG solution this step can be skipped completely since you already have the position and orientation of each image. In fact, if the height above ground is known (either from an existing DEM or a laser altimeter), a single image can immediately be georeferenced, or the image can be used to colourize a LiDAR point cloud.
AT data processing is time-consuming, which can be a real concern for time-critical missions such as those involving rapid response mapping or disaster relief. DG reduces map production time by computing the image position and orientation directly.
The illustration below highlights the difference between processing your data with a georeferencing method using AT and one using Direct Georeferencing.
So if I add an IMU to my GNSS PPK solution, can I enable my UAV mapping system for Direct Georeferencing?
Capturing positional information with a GNSS receiver and orientation data with an IMU and post processing the data can produce a DG solution. However, not all GNSS receivers and IMUs are created equal. For example, does your GNSS receiver collect data from all the major Navigational Satellite Systems and all radio frequencies? Having the ability to see as many GNSS systems as possible and track all frequencies can help maintain UAV signal lock for maintaining consistent data collection.
Another consideration - is the IMU of a general purpose design or is it manufactured and calibrated with accuracy sufficient for survey and mapping missions? Such factors have a direct impact on the quality of the results received from using the Direct Georeferencing approach.
So, if I understand correctly, there is a difference in the GNSS receiver and IMU used.
Absolutely, so let’s have a look at the criteria that should be considered when purchasing an integrated GNSS/IMU for Direct Georeferencing:
- How many channels and frequencies does the GNSS support and is it integrated with an IMU?
- Is the GNSS/IMU calibrated and accurate enough for survey and mapping projects?
- Has the system been tightly designed to optimize Size Weight a Power (SWaP) characteristics for use on UAVs?
- Are different configurations available to optimize results from different types of UAV mapping and survey missions (e.g. corridor mapping, façade scanning or bridge inspection, etc.)?
- What support is available to properly integrate the solution into your UAV mapping system to ensure optimal results?
- Does the solution support cost effective and efficient GNSS augmentation solutions to enable centimetre-level position and orientation anywhere in the world?
How do the Applanix APX UAV DG Solutions stack up?
The Applanix APX UAV solutions, such as the APX-15 UAV unit pictured, include a high-quality Trimble survey grade GNSS receiver supporting all frequencies and constellations, and an integrated solid state MEMS IMU specifically manufactured for Applanix calibrated by our engineering team for survey and mapping missions. The GNSS and IMU are fully integrated as a single unit and are completely supported by the included post-processed differential GNSS-inertial software package POSPac UAV.
Furthermore, the POSPac UAV software has 3 different built-in GNSS Augmentation solutions: Single Base processing, Applanix SmartBase Post-process VRS, and Post-processed Trimble Centerpoint RTX (PP-RTX).
For small local area collects, setting out a GNSS reference station like the Trimble Smart Target base station (pictured below) is a simple way to achieve centimetre-level accuracy.

The Applanix SmartBase module uses existing continuously operated (CORS) networks that are automatically downloaded to generate a VRS without the need to set out a local base station.
The PP-RTX service enables centimetre-level position without the use of base stations, and is ideal for areas that do not have CORS coverage.
Applanix also provides different board-level DG solutions for different types of UAV survey and mapping missions. This includes dual IMUs for use on gimbaled UAV platforms, and a configuration supporting two antennas for static imaging, such as with façade scanning and various inspection projects.
Furthermore, proper integration into the UAV solution is key. What also gives Applanix a competitive edge is that we do not just sell the GNSS/IMU product, we also provide the necessary support to help each customer optimize the integration of the DG solution into their UAV platforms and sensor payloads. Since we specifically focus on providing GNSS/INS solutions for the survey and mapping industries, we have the depth and domain expertise to fully understand the optimization of the solution.
Getting the Best Results for the Money Spent
For high quality and consistent survey and mapping results from UAV platforms, Direct Georeferencing provides a superior return on investment. And using a high-quality integrated solution specifically designed for the UAV survey and mapping industry, such as the Applanix APX boards, will not only provide cost effective value over the operational life of the UAV, it will also provide accurate and precise georeferenced data that customers will come to expect from the their UAV solutions and service provides.